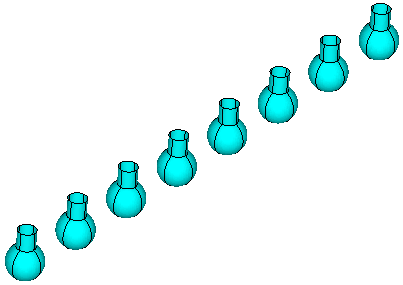
| Array of eight buoys consisting of cylindrical sides and spherical bottoms. This type of configuration can be used to analyse the interactions between the elements of a wave-energy conversion system, where each buoy is heaving independently. In this case the higher-order method is used and the geometry of the buoys is generated by a subroutine in GEOMXACT.DLL. |
 |
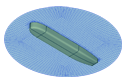
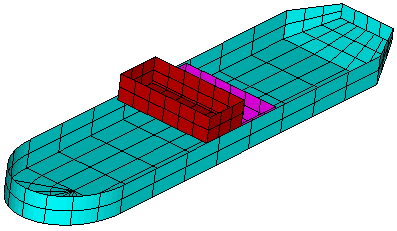
| Drillship Navis Explorer, represented by MultiSurf with direct interface to the higher-order method in WAMIT. This ship has three moonpools, with damping skirts around each moonpool and along the outer sides of the bilge. |
 |
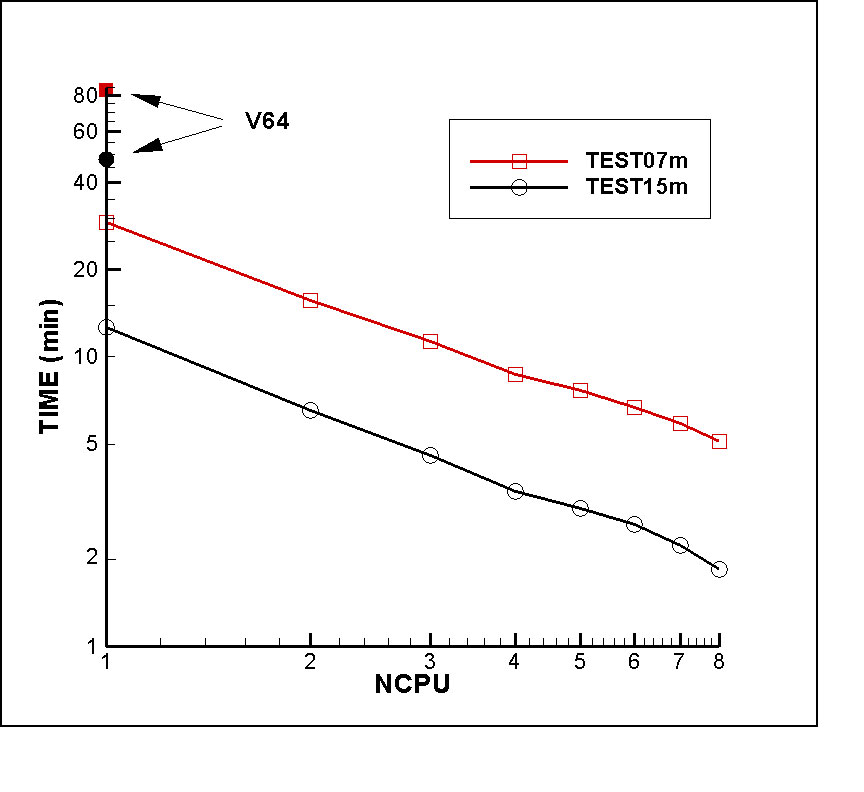
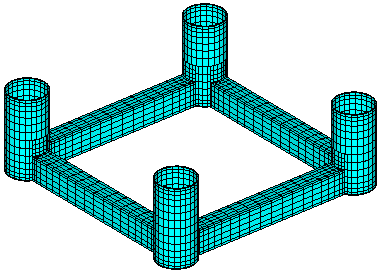
| The ISSC Tension-Leg Platform, represented by 1012 low-order panels on one quadrant (4048 panels on the entire structure). This geometry input is used with the low-order method in the standard WAMIT Test Run 07. Test Run 14 uses the higher-order method for the same structure, with the geometry generated by the subroutine TLP in GEOMXACT.DLL. |
 |
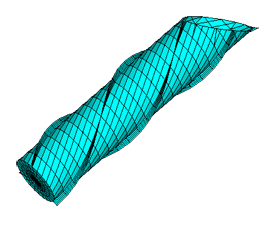
| Spar buoy with helical strakes, with a trimmed waterline including a roll angle of 45 degrees. The strakes are represented by dipole panels of zero thickness. In the untrimmed state this structure is defined by 960 low-order panels, but the panels above the trimmed waterline are not included in the solution and are not shown in this figure. Some of the panels at the waterline are subdivided, to avoid having five sides after trimming. Test 21 uses the higher-order method for the same structure, with the geometry generated by the subroutine SPAR in GEOMXACT.DLL. |
 |
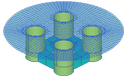
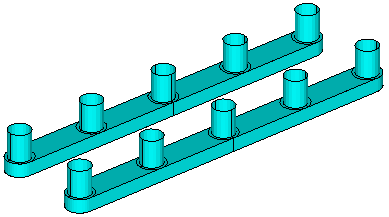
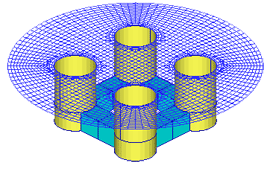
| Semi-sub with ten columns, generated by the subroutine SEMISUB in GEOMXACT.DLL. Test Run 15 describes the analysis of this structure using the higher-order method. |
 |
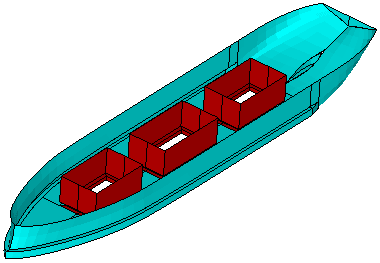
| An FPSO with two internal tanks at different elevations. Test Run 22 describes the analysis of this structure using the higher-order method. The geometry of the hull is generated by the subroutine FPSO in GEOMXACT.DLL, and the tanks are represented by rectangular patches analogous to low-order panels. |
 |
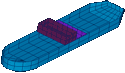
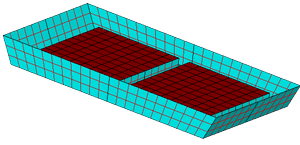
| A simple example of an air-cushion vehicle which is partially supported by pressure in two chambers. The free surface of each chamber is shown in red. Version 7 includes the option to define surface elements of the body as pressure surfaces, where the pressure is assigned instead of the normal velocity. Test 25 illustrates this option. The same option can be applied for structures with oscillating water columns, used to extract wave energy. |
 |
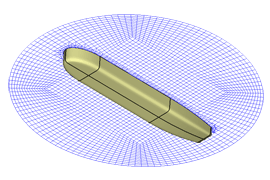
| Fish-eye view of a floating, production, storage and offloading vessel (FPSO ), including a portion of the free-surface which must be included to compute the complete second-order solution. Second-order difference-frequency loads are important since these can excite low-frequency resonances associated with mooring systems. V6S includes options to compute the complete second-order solution, or to compute only the loads due to quadratic interactions of the first-order solution. The latter approximation, which saves considerable computing time, is effective in many applications. |
 |
| Tension-Leg Platform (TLP), including a portion of the free-surface which must be included to compute the complete second-order solution. Second-order wave loads are particularly important for TLPs, which are affected not only by (low) difference-frequency horizontal forces, which can excite `inverted-pendulum' modes of motion, but also by (high) sum-frequency vertical forces which affect the fatigue life of the tendons. The complete second-order solution includes nonlinear forcing on the free surface, which is integrated numerically over the domain shown by the blue mesh. |
 |
|